News
Publications
Data collection based problem called Close Enough Dubins Traveling Salesman Problem with Time Constraints (CEDTSP-TC) is solved using Growing Self-Organizing Array (GSOA).
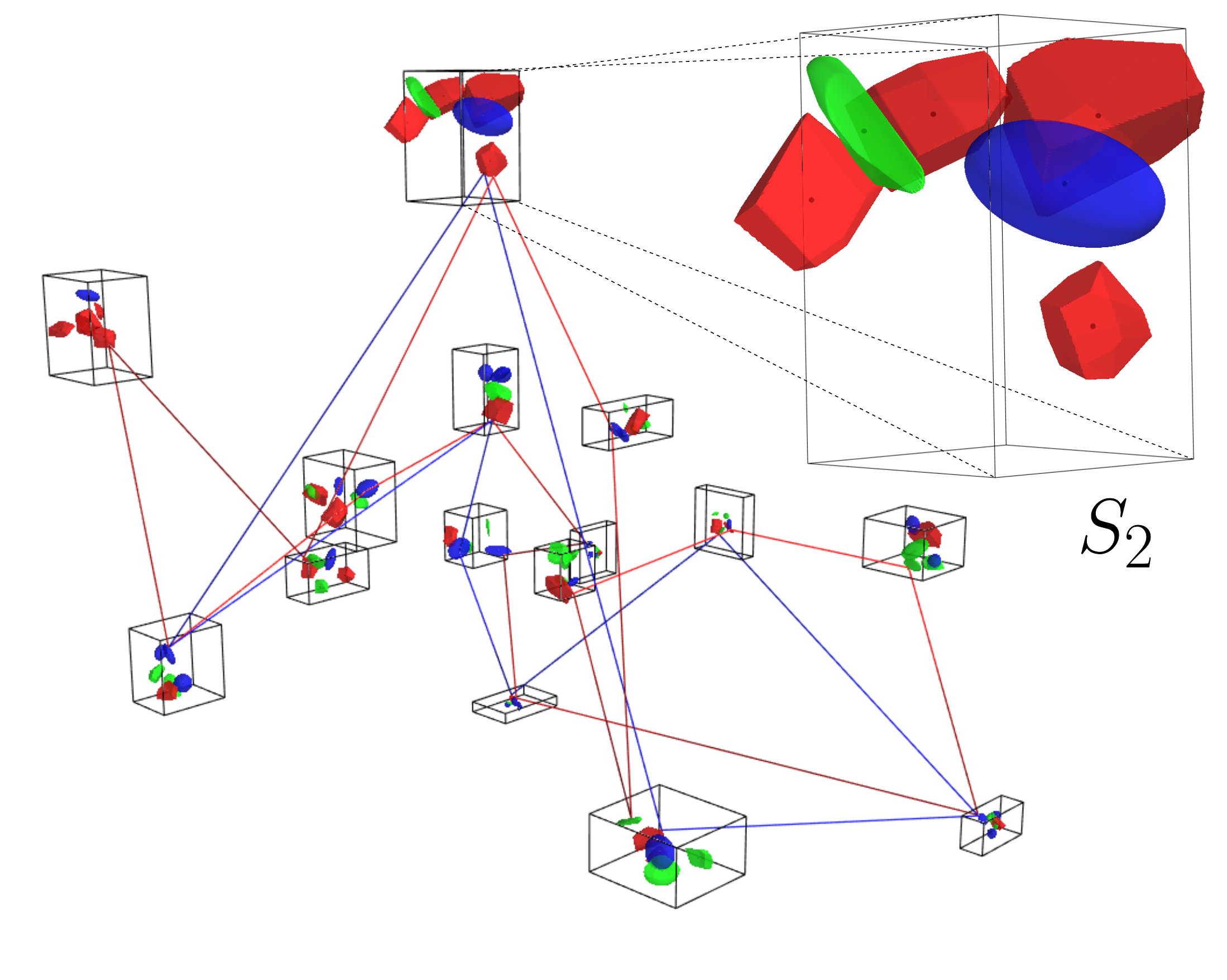
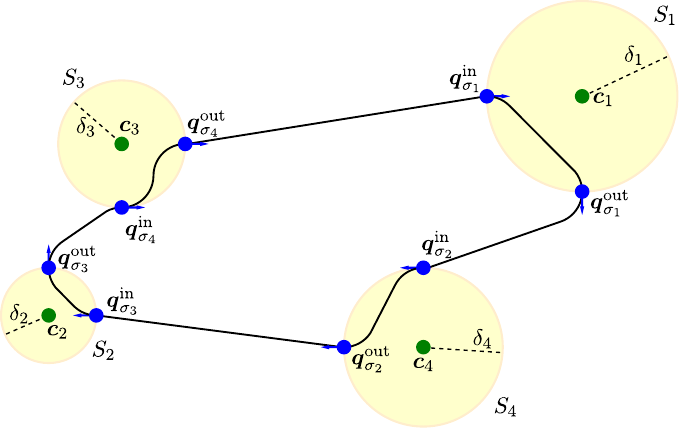
The Generalized Traveling Salesman Problem wing Neighborhoods (GTSPN) is solver with the Branch-and-Bound (B&B) method that uses Mixed-Integer Second-Order Cone Programming (MISOCP) to formulate the complex problem.
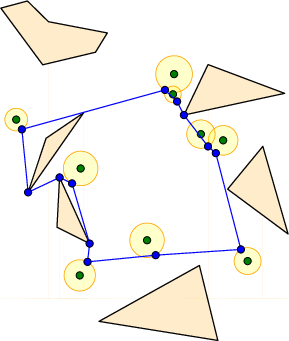
The Close Enough Traveling Salesman Problem in environment with polygonal obstacles is addressed by an improvement heuristic based on the Mixed Integer Non-Linear Programming (MINLP) model.
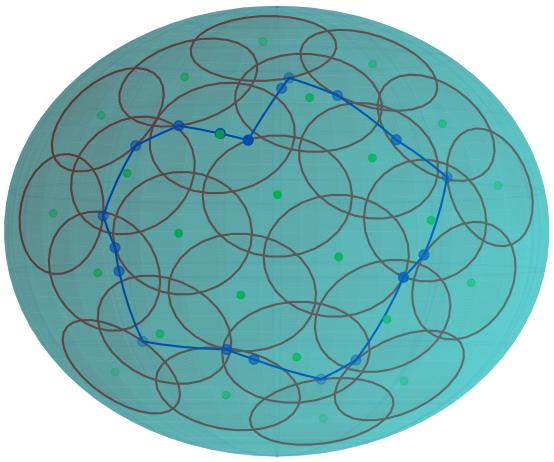
The non-Euclidean Traveling Salesman Problem with Neighborhoods on a Sphere (TSPNS) is motivated by practical scenarios of employing unmanned aerial vehicles in the reflectance transformation imaging (RTI). We propose an unsupervised learning of the Growing Self-Organizing Array (GSOA) and fast post-processing procedure.
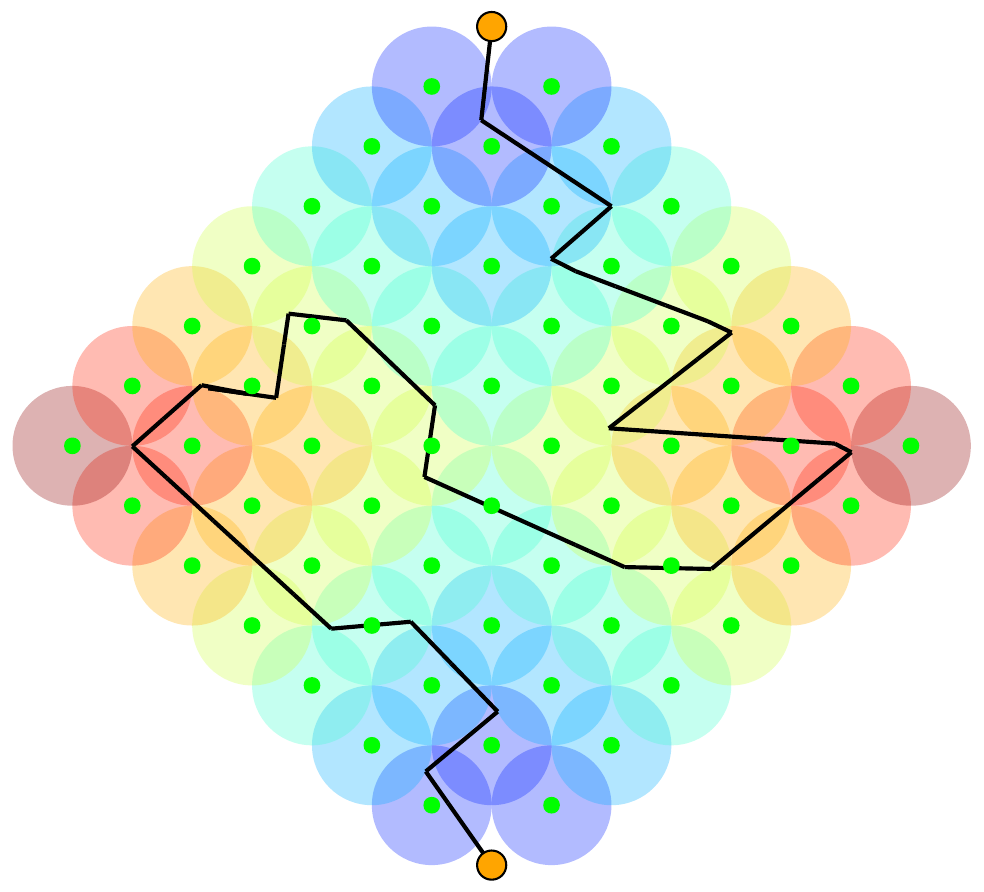
The Hopfield Neural Network (HNN) employed in the solution of the Close Enough Orienteering Problem (CEOP).
A fast heuristics based on the Growing Self-Organizing Array (GSOA) and sampled-based approches to tackle the complex Generalized Traveling Salesman Problem with Neighborhoods (GTSPN).
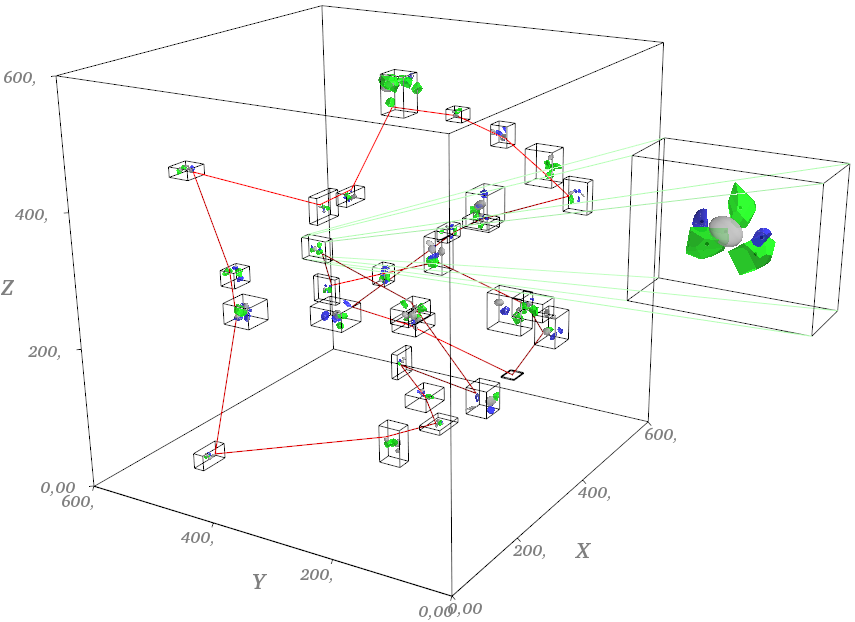
Unsupervised learning employed in the solution of 3D Close-Enough Traveling Salesmna Problem.
Education
- 2021 - PRESENT: Faculty of Electrical Engineering, Czech Technical University in Prague
PhD | Informatics | Thesis: Dynamic robotic routing problem- 2018 - 2021: Faculty of Electrical Engineering, Czech Technical University in Prague
Master degree | Open Informatics, Artificial Inteligence | Thesis: Generalized Routing Problems with Continuous Neighborhoods- 2019 - 2020: Escola Politècnica Superior d’Enginyeria de Vilanova i la Geltrú, Universitat Politècnica de Catalunya
Erasmus+ program- 2015 - 2018: Faculty of Electrical Engineering, Czech Technical University in Prague
Bachelor degree | Open Informatics, Software Systems | Thesis: Artificial Neural Networks in Solution of the Orienteering Problems - 2018 - 2021: Faculty of Electrical Engineering, Czech Technical University in Prague
Jindřiška Deckerová
I am 4th year PhD student at the Czech Technical University in Prague. I work in the Computational Robotics Laboratory with the Articial Inteligence Center in Faculty of Electrical Engineering. My main focus is on the routing problems, the optimal solution of these problems and solution in dynamic environments. Besides, one of my hobbies is popularization of science.
I have a podcast with my friend Míša called věda bez cenzury where we talk about doctorate studies, academia, and science.


