Fast Heuristics for the 3D Multi-Goal Path Planning based on the Generalized Traveling Salesman Problem with Neighborhoods
Authors: Faigl, Jan and Deckerová, Jindřiška and Váňa, Petr
Link: https://ieeexplore.ieee.org/document/8645724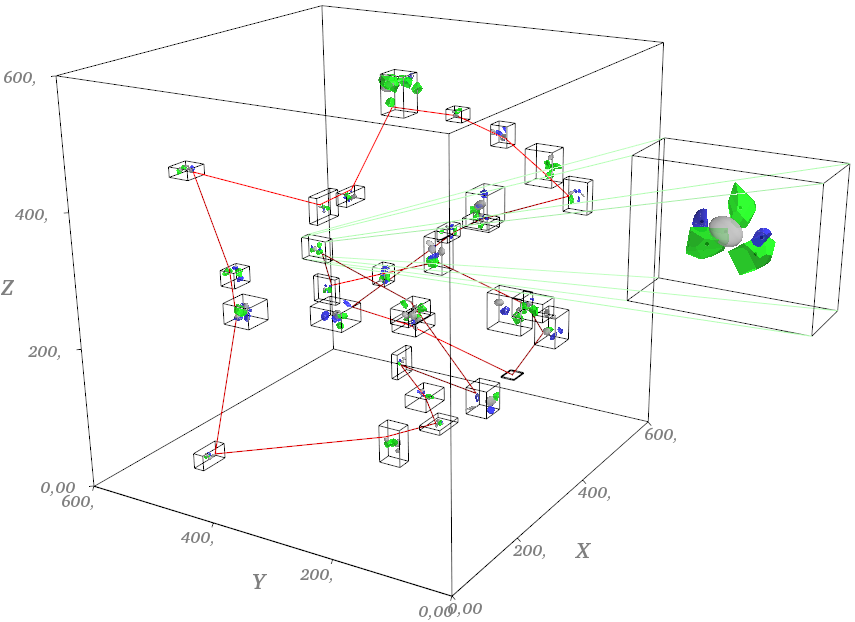
A fast heuristics based on the Growing Self-Organizing Array (GSOA) and sampled-based approches to tackle the complex Generalized Traveling Salesman Problem with Neighborhoods (GTSPN).
Abstract
In this letter, we address the multi-goal path planning problem to determine a cost-efficient path to visit a set of three-dimensional regions. The problem is a variant of the traveling salesman problem with neighborhoods (TSPN) where an individual neighborhood consists of multiple regions, and the problem is to determine a shortest multi-goal path to visit at least one region of each neighborhood. Because each neighborhood may consist of several regions, it forms a neighborhood set, and the problem is called the generalized TSPN (GTSPN) in the literature. We propose two heuristic algorithms to provide a feasible solution of the GTSPN quickly. The first algorithm is based on a decoupled approach using a solution of the generalized TSP that is further improved by a quick post-processing procedure. Besides, we propose to employ the existing unsupervised learning technique called the growing self-organizing array to quickly find a feasible solution of the GTSPN that can be further improved by more demanding optimization. The reported results on existing benchmarks for the GTSPN indicate that both proposed heuristics provide better or competitive solutions than the state-of-the-art reference algorithm, but they are up to two orders of magnitude faster.Citation
author = {Faigl, Jan and Deckerová, Jindřiška and Váňa, Petr},
title = {Fast Heuristics for the 3D Multi-Goal Path Planning based on the Generalized Traveling Salesman Problem with Neighborhoods},
journal= {IEEE Robotics and Automation Letters},
volume= {4},
number= {},
pages = {2439–2446},
year = {2019},
doi = {10.1109/LRA.2019.2900507},
}
Jindřiška Deckerová
I am 4th year PhD student at the Czech Technical University in Prague. I work in the Computational Robotics Laboratory with the Articial Inteligence Center in Faculty of Electrical Engineering. My main focus is on the routing problems, the optimal solution of these problems and solution in dynamic environments. Besides, one of my hobbies is popularization of science.
I have a podcast with my friend Míša called věda bez cenzury where we talk about doctorate studies, academia, and science.


