 věda bez cenzury - Epizoda 12 - Komunikace vědy ft. Karolína | Oct 1, 2023 | Podcast
věda bez cenzury - Epizoda 12 - Komunikace vědy ft. Karolína | Oct 1, 2023 | Podcast
Communication of the research is an important skill of every scientist. In the 12th episode of the veda bez cenzury podcast, our friend Karolina, a scicom expert, gives many tips how to properly communicate not only science.
 věda bez cenzury - Epizoda 11 - Jak na doktorát ČVUT | Aug 30, 2023 | Podcast
věda bez cenzury - Epizoda 11 - Jak na doktorát ČVUT | Aug 30, 2023 | Podcast
PhD is not just fun for forever, but there are some rules you need to follow! Find out what are the requerements you need for succesfully finishing your PhD in episode 11.
 On Improvement Heuristic to Solutions of the Close Enough Traveling Salesman Problem in Environments with Obstacles | Aug 16, 2023 | Selected-Publications
On Improvement Heuristic to Solutions of the Close Enough Traveling Salesman Problem in Environments with Obstacles | Aug 16, 2023 | Selected-Publications
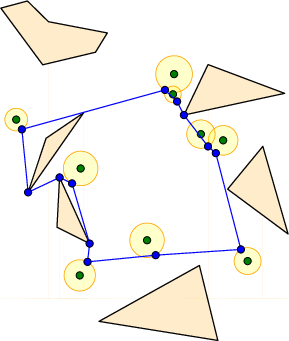
The Close Enough Traveling Salesman Problem in environment with polygonal obstacles is addressed by an improvement heuristic based on the Mixed Integer Non-Linear Programming (MINLP) model.
 PAiONEERS TALKS - Popularizace vědy, roboti a drony | May 23, 2023 | Podcast
PAiONEERS TALKS - Popularizace vědy, roboti a drony | May 23, 2023 | Podcast
I’ve been a guest to the PAiONEERS TALKS podcast hosted by amazing Sara Polak.
 Fast Heuristics for the 3D Multi-Goal Path Planning based on the Generalized Traveling Salesman Problem with Neighborhoods | Dec 22, 2022 | Selected-Publications
Fast Heuristics for the 3D Multi-Goal Path Planning based on the Generalized Traveling Salesman Problem with Neighborhoods | Dec 22, 2022 | Selected-Publications
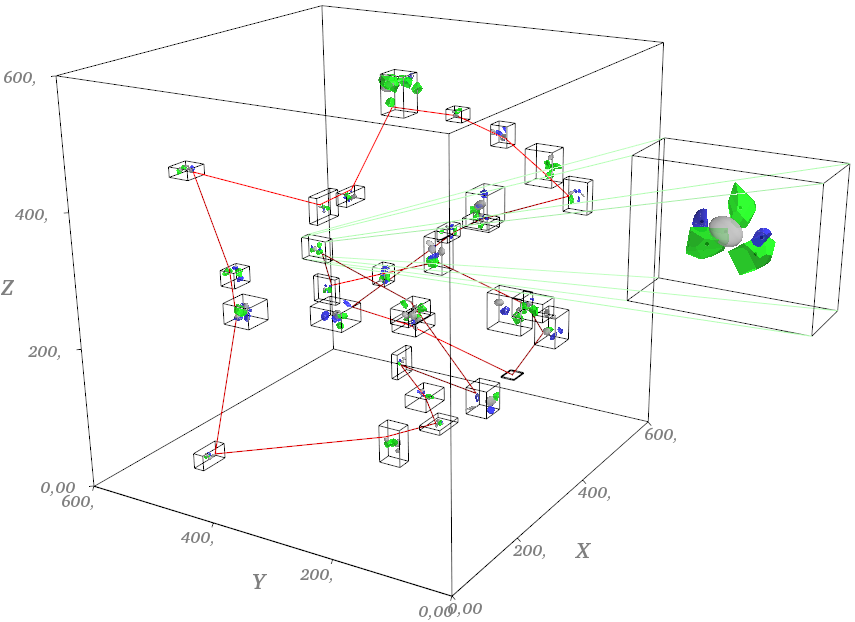
A fast heuristics based on the Growing Self-Organizing Array (GSOA) and sampled-based approches to tackle the complex Generalized Traveling Salesman Problem with Neighborhoods (GTSPN).
 Hopfield Neural Network in Solution of the Close Enough Orienteering Problem | Dec 22, 2022 | Publications
Hopfield Neural Network in Solution of the Close Enough Orienteering Problem | Dec 22, 2022 | Publications
The Hopfield Neural Network (HNN) employed in the solution of the Close Enough Orienteering Problem (CEOP).
Unsupervised learning employed in the solution of 3D Close-Enough Traveling Salesmna Problem.
 Traveling Salesman Problem with Neighborhoods on a Sphere in Reflectance Transformation Imaging Scenarios | Dec 22, 2022 | Selected-Publications
Traveling Salesman Problem with Neighborhoods on a Sphere in Reflectance Transformation Imaging Scenarios | Dec 22, 2022 | Selected-Publications
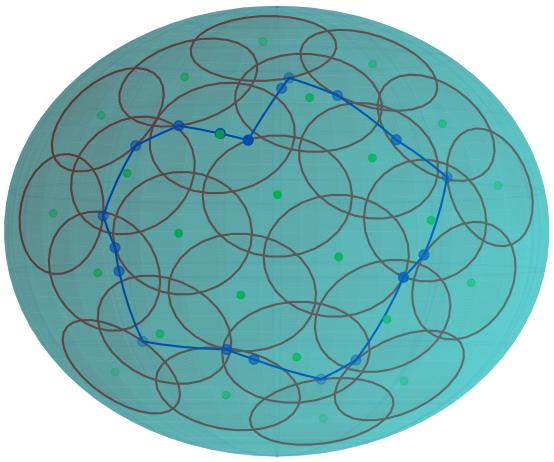
The non-Euclidean Traveling Salesman Problem with Neighborhoods on a Sphere (TSPNS) is motivated by practical scenarios of employing unmanned aerial vehicles in the reflectance transformation imaging (RTI). We propose an unsupervised learning of the Growing Self-Organizing Array (GSOA) and fast post-processing procedure.